Autonomous Freight Revolution: How Self-Driving Trucks Are Reshaping Global Supply Chains Autonomous Vehicles / Brandial Bright Autonomous Freight Revolution: How Self-Driving Trucks Are Reshaping Global Supply Chains Read More »
Autonomous Vehicle Mobility-As-A-Service (MaaS): The Future of Subscription-Based Transportation? Autonomous Vehicles / Brandial Bright Autonomous Vehicle Mobility-As-A-Service (MaaS): The Future of Subscription-Based Transportation? Read More »
Autonomous Vehicle Funding More Than Triples in 2026, Hits Record $21.4 Billion Autonomous Vehicles / Brandial Bright Autonomous Vehicle Funding More Than Triples in 2026, Hits Record $21.4 Billion Read More »
Waymo Airport Service Areas in the U.S. — A Complete Breakdown Autonomous Vehicles, Waymo / Brandial Bright Waymo Airport Service Areas in the U.S. — A Complete Breakdown Read More »
Top 10 Key Facts About Wayve: Autonomous Vehicle Company “Pioneering A New Era for Automated Driving” Autonomous Vehicles / Brandial Bright Top 10 Key Facts About Wayve: Autonomous Vehicle Company “Pioneering A New Era for Automated Driving” Read More »
Top 10 Electrifying Key Facts About Baidu’s Apollo Go (2026) Autonomous Vehicles, Baidu Apollo / Brandial Bright Top 10 Electrifying Key Facts About Baidu’s Apollo Go (2026) Read More »
Boeing’s Wisk Aero: Autonomous evToL Revolutionizing Self-Flying Transportation Autonomous Vehicles, Electric Vehicles / Brandial Bright Boeing’s Wisk Aero: Autonomous evToL Revolutionizing Self-Flying Transportation Read More »
Waymo’s 6th-Generation Robotaxi Begins Full Autonomous Operations Autonomous Vehicles, Waymo / Brandial Bright Waymo’s 6th-Generation Robotaxi Begins Full Autonomous Operations Read More »
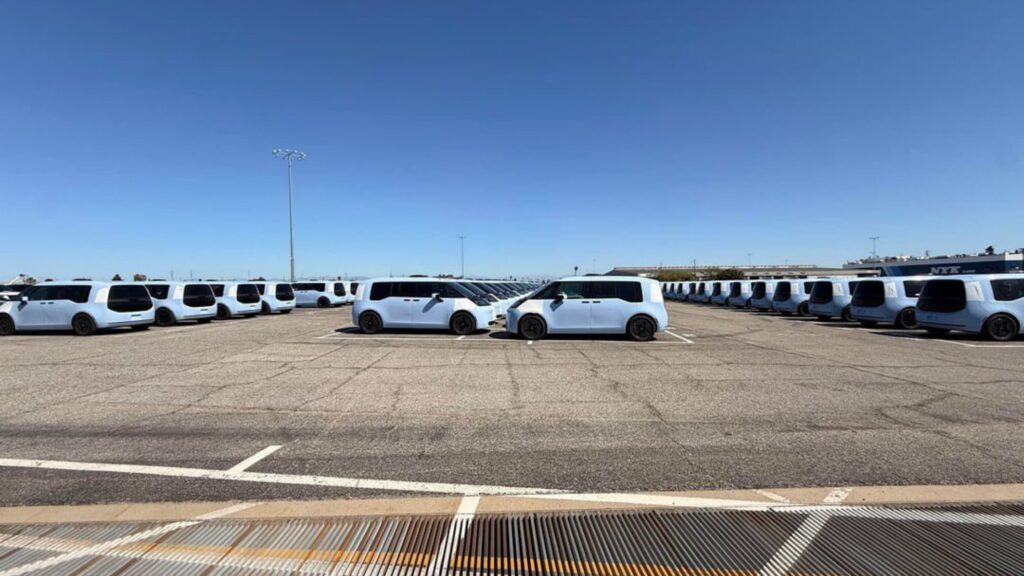
Nuro’s Autonomous Vehicle Journey: From Delivery Robots to Level 4 Robotaxis with Uber and Lucid Autonomous Vehicles / Brandial Bright Nuro’s Autonomous Vehicle Journey: From Delivery Robots to Level 4 Robotaxis with Uber and Lucid Read More »
Physical AI in Autonomous Vehicles: How Will It Work? Autonomous Vehicles / Brandial Bright Physical AI in Autonomous Vehicles: How Will It Work? Read More »
Physical AI in Autonomous Vehicles? CES 2026 Key Highlights Autonomous Vehicles / Brandial Bright Physical AI in Autonomous Vehicles? CES 2026 Key Highlights Read More »
Tesla Robotaxi Service Areas in the US: Updated Autonomous Vehicles / Brandial Bright Tesla Robotaxi Service Areas in the US: Updated Read More »
Will Self-Driving Cars Replace Human Drivers Anytime Soon? Autonomous Vehicles / Brandial Bright Will Self-Driving Cars Replace Human Drivers Anytime Soon? Read More »
2026 Waymo Safety Impact Compared with Human Drivers (in Waymo’s Operating Cities) Autonomous Vehicles / Brandial Bright 2026 Waymo Safety Impact Compared with Human Drivers (in Waymo’s Operating Cities) Read More »
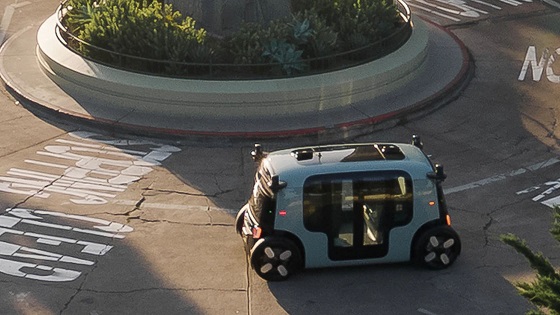
Zoox Service Areas in the U.S. (A Complete Guide) Autonomous Vehicles / Brandial Bright Zoox Service Areas in the U.S. (A Complete Guide) Read More »
Waymo Service Areas in the US: A Definitive Guide Autonomous Vehicles / Brandial Bright Waymo Service Areas in the US: A Definitive Guide Read More »
Scientists to Add New White Light to Traffic Lights for Autonomous Vehicles Autonomous Vehicles / Brandial Bright Scientists to Add New White Light to Traffic Lights for Autonomous Vehicles Read More »
Waymo Begins Self-Driving Delivery: These Companies Won’t Like It Autonomous Vehicles / Brandial Bright Waymo Begins Self-Driving Delivery: These Companies Won’t Like It Read More »
Autonomous Shared Mobility Startup, Beep, is “Quietly” Breaking Records Autonomous Vehicles / Brandial Bright Autonomous Shared Mobility Startup, Beep, is “Quietly” Breaking Records Read More »
Will the Lyft and Tensor Robocar Partnership Work? Autonomous Vehicles / Brandial Bright Will the Lyft and Tensor Robocar Partnership Work? Read More »